Hollow Harmonic Gear for Robot Arm Joint
Guangdong Saini Intelligent Equipment Technology Co., Ltd.- Feature:High Speed, High Torque
- Step:Multi-Step
- Layout:Coaxial
- Openness:Open
- Installation:Horizontal
- Transmission Form:Gear
Base Info
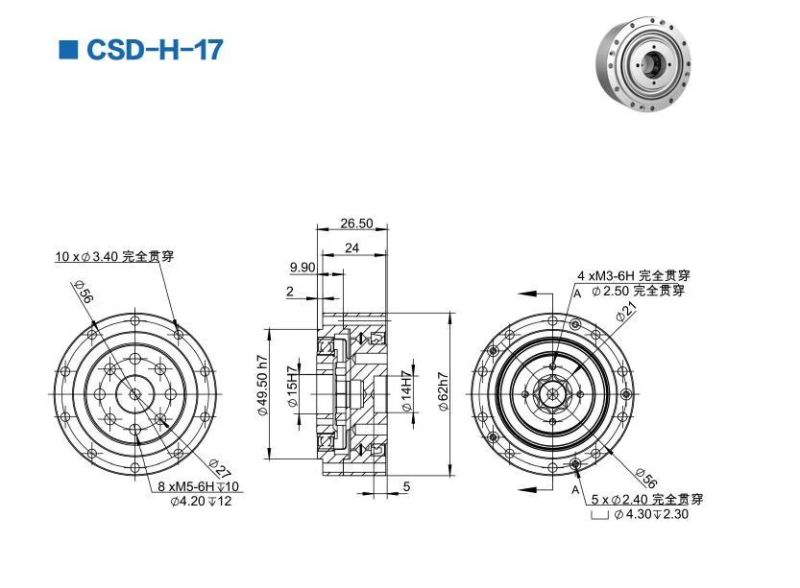
- Model NO.:CSD-H-17
- Type:Flange
- Brand:G+
- Material:Stainless
- Color:Silver
- Volume:Small
- Maintenance:Na
- Quality:High Quality
- Transport Package:Shipping Cartons
- Specification:17*13*10cm
- Trademark:G+
- Origin:China
- HS Code:8483409000
- Production Capacity:100000
Description
Basic Info.
Model NO. CSD-H-17 Type Flange Brand G+ Material Stainless Color Silver Volume Small Maintenance Na Quality High Quality Transport Package Shipping Cartons Specification 17*13*10cm Trademark G+ Origin China HS Code 8483409000 Production Capacity 100000Product Description
Hollow harmonic gear for robot arm jointHarmonics
The principle of gear transmission
The harmonic gear transmission is invented by the American inventor C.W.Musser in 1955. It is a new type of transmission mode which uses flexible working components to move into motion or power by elastic deformation. It breaks through the mode of mechanical transmission with rigid component mechanism and uses a flexible component to realize mechanical transmission. Thus, a series of special functions which are difficult to achieve by other transmission are obtained. Because the deformation process of the intermediate flexible member is basically a symmetrical harmonic, it is named. In addition to the former Soviet Union called this kind of transmission waveform transmission or flexible wheel transmission, the United States, Britain, Germany, Japan and other countries are called "harmonic drive".
The composition of the gear transmission
Rigid wheel: rigid internal gear, usually 2 teeth more than flexible wheel, usually fixed on the chassis.
Flexible cup: thin cup type metal elastic part with outer gear on the outer ring, which is deformed with the rotation of the wave generator and is usually connected with the output shaft.
Wave generator: consisting of an elliptic cam and a flexible bearing, usually connected to the input shaft. The inner ring of the flexible bearing is fixed on the cam, and the outer ring can be elastically shaped into ellipse through the ball.
The principle of gear transmission deceleration
The principle of the harmonic gear deceleration is the relative motion of the flexible wheel, the rigid wheel and the wave generator, which is mainly the flexible deformation of the flexible wheel to realize the movement and the transmission of the power. The oval cam in the wave generator rotates in the flexible wheel to make the flexible wheel deform, and the flexible wheel gear and the rigid wheel gear at both ends of the shaft of the oval cam shaft of the wave generator. The flexible wheel teeth at both ends of the short shaft are removed from the gear teeth at the ends of the short axis. The teeth between the long axis and the short axis of the wave generator are located in the different sections of the two circumference of the flexible wheel and the steel wheel in the meshing state, which is called meshing. In the state of gradual withdrawal from meshing and semi-meshing, it is called meshing out. When the wave generator is continuously rotated, the flexible wheel produces the deformation continuously, making the two wheels rodent, meshing, meshing and disengaging four kinds of motion to change their original orking state and produce the wrong tooth motion, and realize the movement transmission of the active wave generator to the flexible wheel.